个人资料
专家类别
教育经历
个人简介个人基本情况(English website 胡标,副教授,博士生导师。多年来一直从事实时系统调度算法分析与设计、物联网系统运行性能优化、仓储物流机器人调度、多机协同路径规划和工业机器人智能控制等研究工作,取得了多项重要创新成果。近年来主持国家自然科学基金青年项目1项、国家自然科学基金重大研究计划培育项目1项,科技部”科技创新2030“脑计划课题1项,科技部科技部重点研发计划子课题1项、北京化工大学人才启动项目1项。参与了国防科研基础计划、重点实验室开放基金若干项。 奖励
教学科研概况主持项目 纵向 拼多多-中国农业大学研究基金,“安全实时农机车联网系统计算资源调度方法研究”,2023.10-2024.09,主持 国家科技部重点专项课题,“类脑异构计算平台构建与计算性能优化研究”,2021.12-2026.11,主持 国家自然科学基金青年科学基金项目,“混合关键需求下的汽车软件功能调度方法研究”,2019.1-2021.12,主持 国家自然科学基金重大研究计划培育项目,“异构仓储物流机器人集群自主作业研究”,2019.1-2021.12,主持 国家重点研发计划重点专项课题任务,“基于全域环境感知与多源信息融合的巡检侦测机器人研制”,2020.1-2022.12,主持 北京化工大学人才计划启动项目,“混合关键系统负载在线预测机制与自适应调度算法研究”,2018.01-2020.12,主持 横向 北京xxxx有限公司,“基于边缘计算的人形机器人联合路径规划与导航”,2023.12-2024.11 主持 北京xxxx有限公司,“卫星拒止下高精度时间同步与定位”,2024.12-2025.11 主持 期刊论文(一作、通讯) [JCSC'24].Chenyu Cai, Biao Hu*. BPNS: A Fast and Accurate Power Estimation Model for Embedded Devices. Journal of Circuits, Systems, and Computers, vo. 33, no. 15 pp. 2450275, 2024. (link) [JIoT'24].Biao Hu, Yinbin Shi, Gang Chen, Zhengcai Cao, MengChu Zhou, Workload-Aware Scheduling of Real-Time Jobs in Cloud Computing to Minimize Energy Consumption, IEEE Internet of Things Journal, vo. 11, no. 1, pp. 638-652, 2024. (link) [TPDS'23].Biao Hu, Xincheng Yang, Mingguo Zhao, Energy-Minimized Scheduling of Intermittent Real-Time Tasks in a CPU-GPU Cloud Computing Platform, IEEE Transactions on Parallel and Distributed Systems, vo. 34, no. 8, pp. 2391-2402, 2023. (link) [JSA'23]. Biao Hu, Xincheng Yang, Mingguo Zhao, Online Energy-Efficient Scheduling of DAG Tasks on Heterogeneous Embedded Platforms, Journal of Systems Architecture, vo. 140, pp. 102894, 2023. (link) [TII'23]. Biao Hu, Zhilei Yan, Mingguo Zhao, Workload-Aware Scheduling of Multiple-Criticality Real-Time Applications in Vehicular Edge Computing System, IEEE Transactions on Industrial Informatics, vo. 19, no. 10, pp. 10091-10101, 2023. (link) [TCC'23].Biao Hu, Yinbin Shi, Zhengcai Cao, Mengchu Zhou, A Hybrid Scheduling Framework for Mixed Real-Time Tasks in an Automotive System With Vehicular Network, IEEE Transactions on Cloud Computing, vo. 11, no. 3, pp. 2231-2244, 2023.(link) [TII'23]. Biao Hu, Yinbin Shi, Zhengcai Cao, Adaptive Energy-Minimized Scheduling of Real-Time Applications in Vehicular Edge Computing, IEEE Transactions on Industrial Informatics, vo. 19, no. 5, pp. 6895-6906, 2023.(link) [TITS'22]. Biao Hu, Shengjie. Xu, Zhengcai. Cao, Mengchu Zhou, Safety-Guaranteed and Development Cost-Minimized Scheduling of DAG Functionality in an Automotive System, IEEE Transactions on Intelligent Transportation Systems, vo. 23, no. 4, pp. 3074-3086, 2022. (link) [TCC'22].Biao Hu, Zhengcai Cao, Mengchu Zhou, Scheduling Real-Time Parallel Applications in Cloud to Minimize Energy Consumption, IEEE Transactions on Cloud Computing, vo. 10, no. 1, pp. 662-674, 2022.(link) [TSC'22]. Biao Hu, Zhengcai Cao, Mengchu Zhou, Energy-Minimized Scheduling of Real-Time Parallel Workflows on Heterogeneous Distributed Computing Systems, IEEE Transactions on Services Computing, vol. 15, no. 5, pp. 2766-2779, 2022. (link) [TIE'21]. Biao Hu, Zhengcai Cao, Mengchu Zhou, An Efficient RRT-Based Framework for Planning Short and Smooth Wheeled Robot Motion Under Kinodynamic Constraints, IEEE Transactions on Industrial Electronics, vo. 68, no. 4, pp. 3292-3302, 2021. (link) [TII'20]. Biao Hu, Zhengcai Cao, Minimizing Resource Consumption Cost of DAG Applications With Reliability Requirement on Heterogeneous Processor Systems, IEEE Transactions on Industrial Informatics, vol. 16, no. 12, pp. 7437-7447, 2020. (link) [RTS'19]. Biao Hu, Lothar Thiele, Pengcheng Huang, Kai Huang, Christoph Griesbeck, Alois Knoll, FFOB: efficient online mode-switch procrastination in mixed-criticality systems, Real-Time Systems, vol. 55, pp. 417-513, 2019. (link) [IA'18]. Biao Hu, Gang Chen Kai Huang, Semi-Slack Scheduling Arbitrary Activation Patterns in Mixed-Criticality Systems, IEEE Access, vol. 6, pp. 68507-68524, 2018. [BISE'19]. Zhengcai Cao, Lijie Zhou, Biao Hu, Chengran Lin, An Adaptive Scheduling Algorithm for Dynamic Jobs for Dealing with the Flexible Job Shop Scheduling Problem, Business & Information Systems Engineering, vol. 61, pp. 299-309, 2019. [TECS'16]. Biao Hu, Kai Huang, Gang Chen, Long Cheng, Alois C. Knoll. Evaluation and Improvements of Runtime Monitoring Methods for Real-Time Event Streams. ACM Transactions Embedded Computing Systems, vol. 15, no.3, pp. 56:1-56:26, 2016. [TECS'16]. Biao Hu, Kai Huang, Gang Chen, Long Cheng, Alois C. Knoll. Adaptive Workload Management in Mixed-Criticality Systems. ACM Transactions Embedded Computing Systems, vol. 16, no. 1, pp. 14:1-14:27, 2016. [NC'19]. Zhengcai Cao, Xiaowen Xu, Biao Hu, Meng Zhou, Qinglin Li. Real-time gesture recognition based on feature recalibration network with multi-scale information. Neurocomputing, no. 347, pp. 119-130, 2019. [TC'18]. Kai Huang, Biao Hu, Long Chen, Alois C. Knoll, Zhihua Wang. Adas on Cots with OpenCL: A Case Study with Lane Detection. IEEE Transactions on Computers, vol. 67, no. 4, pp. 559-565, 2018. [JCSC'17]. Biao Hu, Kai Huang, Gang Chen, Long Cheng, Dongkun Han, Alois C. Knoll. Schedulability Analysis Towards Arbitrarily Activated Tasks in Mixed-Criticality Systems. Journal of Circuits, Systems, and Computers, vol. 26, no. 10, pp. 1750159:1-1750159:31, 2017. [Sensors'17]. Biao Hu, Uzair Sharif, Rajat Koner, Guang Chen, Kai Huang, Feihu Zhang, Walter Stechele, Alois C. Knoll. Random Finite Set Based Bayesian Filtering with OpenCL in a Heterogeneous Platform. Sensors, vol. 17, no. 4, pp. 843, 2017. 会议论文(一作) [ROBIO'22]. Biao Hu,Ruilin Yang, A KubeEdge-based Multi-Robot Collaboration Framework for Perception, Planning and Navigation, IEEE International Conference on Robotics and Biomimetics, 2022, pp. 1186-1191. [SMC'22]. Biao Hu, Mingyue Cui, Zhengcai Cao, A Slope-Adaptive Navigation Approach for Ground Mobile Robots, IEEE International Conference on Systems, Man, and Cybernetics, 2022, pp. 610-615. [SMC'21]. Biao Hu, Haonan Wang, Zhengcai Cao, Probability-based Path Planning for Multi-Robot Systems with Stochastic Behavior in a Grid Map, IEEE International Conference on Systems, Man, and Cybernetics, 2021, pp. 2310-2315. [SMC'20]. Biao Hu, Haonan Wang, Zhengcai Cao, Heterogeneous Multi-Robot Path Planning Based on Probabilistic Motion Model, IEEE International Conference on Systems, Man, and Cybernetics, 2020, pp. 1323-1328. [SMC'19]. Biao Hu, Zhengcai Cao, Minimizing Task Completion Time of Prioritized Motion Planning in Multi-Robot Systems, IEEE International Conference on Systems, Man and Cybernetics, 2019, pp. 1018-1023. [CPHS'20]. Biao Hu, Shengjie Xu, Zhengcai Cao, Multi-Robot Path Planning for Each Robot with Several Jobs in a Single Trip, 3rd IFAC Workshop on Cyber-Physical and Human Systems, 2020, pp. 279-284. [CASE'19]. Biao Hu, Zhengcai Cao, Lijie Zhou, Adaptive Real-Time Scheduling of Dynamic Multiple-Criticality Applications on Heterogeneous Distributed Computing Systems, IEEE 15th International Conference on Automation Science and Engineering, 2019, pp. 897-903. [CASE'20]. Biao Hu, Hao Chen, Zhengcai Cao, Chengran Lin, A Self-Adaptive Cuckoo Search Algorithm for Energy Consumption Minimization Problem with Deadline Constraint, IEEE 16th International Conference on Automation Science and Engineering, 2020, pp. 1479-1484. [ICCA'19]. Biao Hu, Zhengcai Cao, An Efficient Approach for Adaptive Online Power Management in Mixed-Criticality Systems, IEEE 15th International Conference on Control and Automation, 2019, pp. 1494-149. [ROBIO'19]. Biao Hu, Shibo Shao, Zhengcai Cao, Qing Xiao, Qunzhi Li and Chao Ma, Learning a Faster Locomotion Gait for a Quadruped Robot with Model-Free Deep Reinforcement Learning, IEEE International Conference on Robotics and Biomimetics, 2019, pp. 1097-1102. [ASPDAC'18]. Biao Hu, Kai Huang. Scheduling and shaping of complex task activations for mixed-criticality systems. Asia and South Pacific Design Automation Conference, 2018, pp. 58-63. [DATE'17]. Biao Hu, Kai Huang, Gang Chen, Long Cheng, Alois C. Knoll. Online workload monitoring with the feedback of actual execution time for real-time systems. Design, Automation and Test in Europe Conference, 2017, pp. 764-769. [EMSOFT'16]. Biao Hu, Kai Huang, Pengcheng Huang, Lothar Thiele, Alois C. Knoll. On-the-fly fast overrun budgeting for mixed-criticality systems. International Conference on Embedded Software, 2016, pp. 25:1-25:10. [EMSOFT'15]. Biao Hu, Kai Huang, Gang Chen, Long Cheng, Alois C. Knoll. Adaptive runtime shaping for mixed-criticality systems. International Conference on Embedded Software, 2015, pp. 11-20. [ASPDAC'15]. Biao Hu, Kai Huang, Gang Chen, Alois C. Knoll. Evaluation of runtime monitoring methods for real-time event streams. Asia and South Pacific Design Automation Conference, 2015, pp. 582-587. [IROS'12]. Biao Hu, Mingguo Zhao. The optimization of spring stiffness for passive dynamic walker. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp.1943-1949. 专利 [1]. 胡标,陈浩,曹政才,黄冉. 一种对异构分布式系统中并行应用程序的调度方法. 国家发明专利号:202011512317.5,2024.3. (授权) [2]. 胡标,杨瑞霖,曹政才. 一种基于边缘计算的多机器人协同控制方法:202111538180.5,2024.8. (授权) [3]. 胡标,邵士博,曹政才,邵琦,李群智,马超. 基于深度强化学习的四足机器人适应性步态自主生成方法. 国家发明专利号:202110365655.9,2023.2. (授权) [4]. 胡标,徐圣杰,曹政才,黄冉. 一种应用于仓储环境下多机器人路径快速规划方法. 国家发明专利号:202010233690.0,2021.10. (授权) [5]. 胡标,王浩南,曹政才. 一种可自主搬运小型不规则货物的 AGV 小车. 国家发明专利号:202110365568.3,2021.7. (授权) [5]. 曹政才,林诚然,胡标. 一种复杂生产过程闭环调度优化方法. 国家发明专利号:201911343154.X,2022.5. (授权) [7]. 曹政才,居仁杰,刘天龙,胡标,周萌. 一种基于绳驱动的可重构冗余机械臂. 国家发明专利号:201911301394.3,2021.6. (授权) [8]. 曹政才,谢红玉,黄冉,胡标,周萌. 一种危险化工事故中移动机器人定位与建图方法. 国家发明专利号:201910056654.9,2021.1. (授权) [9]. 曹政才,肖清,黄冉,胡标,张东,耿鹏,李俊宽. 一种仿蛇搜救机器人适应性步态自主涌现方法. 国家发明专利号:201811596803.2,2020.7. (授权) [10]. 曹政才,田珂,胡标,周萌,王晓彤. 一种应用于危化品环境下多机器人路径规划方法. 国家发明专利号:201811596806.6,2022.05. (授权) [11]. 王洪刚,胡标. 一种机器人抓取检测方法. 国家发明专利号:202110614570.X,2023.12. (授权) [12]. 曹政才,邵琦,胡标,邵士博,张东,李群智,马超. 一种四足机器人运动控制自生成和实物迁移方法. 国家发明专利号:202011509972.5,2020.12. (受理) [13]. 胡标,王浩南. 一种可用于大型牲畜结肠检查的微型履带式机器人.国家发明专利号:202210496034.9,2022.05. (受理) [14]. 胡标,陈友亮,闫之磊. 一种基于手机屏输入的机器人轨迹模仿方法:202210696186.3,2022.06. (受理) [15]. 胡标,崔明越,曹政才. 一种应用于三维环境中的机器人自主定位与导航的方法:202210174162.1,2022.2. (受理) 教材 [1]. 《无人胜有人--聚焦无人平台的发展与应用》,中国科学技术出版社,2019,参编 [2]. 《机器视觉及深度学习——经典算法与系统搭建》,化学工业出版社,2022,参编 [3]. 《控制工程基础》,中国农业大学,2023,参编 [4]. 《自动控制原理》,高等教育出版社,2022,副主编 本科毕设论文 2024 面向乳品加工不确定性酸碱清洗数据的回归算法研究(吴镔芮, 基于大语言模型的农业大棚多功能栽培辅助系统设计与开发(朱玉, 面向森林防火的无人机视角下树木健康状况检测(张乃天, 2023 微型肠道机器人机电系统设计及肠道息肉识别(陶胜,院优秀论文,保送航天一院读研, 面向盆栽生长监测的软硬件系统设计与实现(张越涵,院优秀论文,伦敦大学学院留学,面向盆栽生长监测的软硬件系统设计与实现.docx) 基于计算迁移的SLAM系统设计与实现(袁兆伟,院优秀论文,清华大学机械学院读研,基于计算迁移的SLAM系统设计与实现.doc) 2022 基于手机屏书写记录的机械臂模仿书写系统设计与实现(陈友亮,院优秀论文,保送同济大学读研, 基于视觉伺服控制的转魔方机械装置设计与实现(吴小末, 2021
2020
2019 基于激光雷达的危化工机器人自主巡检方法(王浩南, 论文)
2018 基于凸优化的机械臂时间最优轨迹规划 (叶豪亮, 论文)
Supervised Bachelor/Master Thesis in TUM:
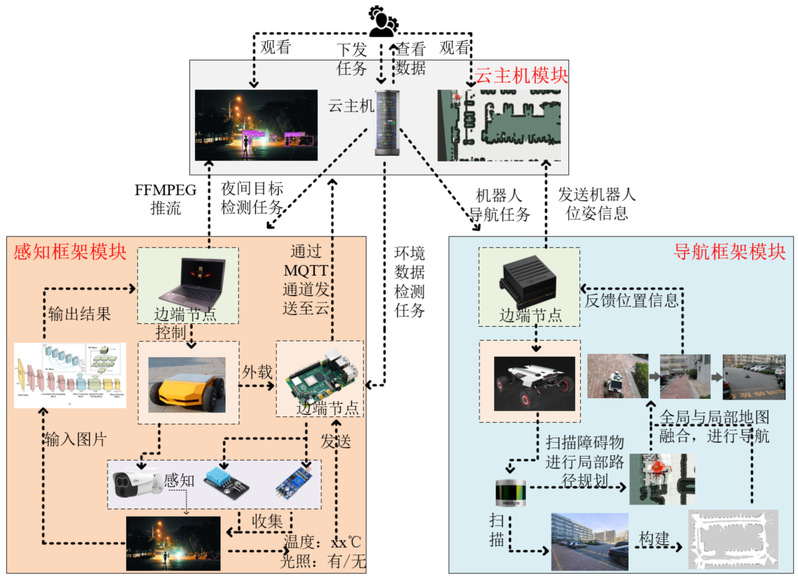
社会职务学会任职: 中国计算机学会嵌入式系统专业委员会,执行委员 常驻编委 SCI期刊,Journal of Circuits, Systems, and Computers,领域副主编 会议程序委员 第十八届全国软件与应用学术会议程序委员会 2019 IEEE International Conference on Robotics and Biomimetics IEEE International Conference on Emerging Technologies and Factory Automation ETFA 2020 2022 IEEE International Conference on Systems, Man, and Cybernetics(副编辑) 活动动态研究领域1. 云-边-端协同计算 1.1 计算卸载与任务分发: 1)根据应用的需求,智能地将计算任务卸载到云、边缘或终端设备,以实现最佳的性能和资源利用率; 2)设计任务分发策略,以考虑网络状况、设备性能和能源消耗等因素; 1.2 资源管理与优化: 1)有效地管理云、边缘和终端设备的计算资源,以满足多样化的应用需求; 2)进行资源优化,以最小化能源消耗、降低成本并提高性能; 1.3 边缘智能与机器学习: 1)在边缘设备上实现机器学习和人工智能任务,以减少数据传输延迟和提高实时性; 2)将云端的大规模训练与边缘设备的推理任务协同进行,以提高整体的机器学习性能; 2. 机器人路径规划与导航 2.1 环境感知和建模: 1)使用传感器(例如摄像头、激光雷达、超声波传感器等)来感知和建模机器人所处的环境; 2)实现实时地地图生成和环境变化检测,以便机器人能够适应动态环境; 2.2 路径规划算法: 1)开发高效的路径规划算法,使机器人能够在复杂的环境中找到最优或次优的路径; 2)考虑避免障碍物、最小化路径长度、降低能源消耗等因素,制定适应不同任务和环境的算法; 2.3 多机器人协同导航: 1)研究多个机器人之间的协同导航策略,以便它们能够在协同工作中避免碰撞和冲突,完成复杂任务; 2)考虑分布式感知、通信和协同控制算法;
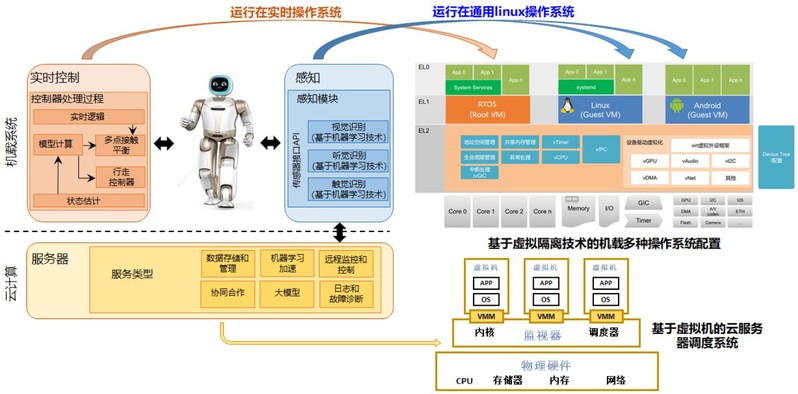
3. 机器人混合关键系统 2.1 虚拟化技术优化: 1)改进虚拟化技术,以减少虚拟化开销,提高性能,降低延迟,并确保可预测性; 2)优化虚拟机监控程序(VMM)和虚拟机管理器(Hypervisor)的设计,以适应混合关键系统的需求; 2.2 资源分配与调度: 1)开发高效的资源分配和调度算法,以确保不同关键性任务能够按照其需求获得足够的计算、存储和网络资源; 2)研究在虚拟化环境中实现资源隔离,以避免资源争用和干扰; 2.3 实时性保证: 1)确保混合关键系统中的实时任务能够满足其时限要求。这包括研究实时虚拟机调度和资源分配方法,以确保任务的响应时间可预测且稳定; 2)考虑实时任务的截止期限和优先级,以有效地调度它们;
开授课程
本科生课程:近十年课程数据
科研项目
纵向项目
论文论文科技成果
软件著作
荣誉及奖励
招生信息博士研究生常年招生博士研究生。 背景:工科 硕士研究生常年招生硕士(学硕+专硕)研究生若干。 本科生科研项目常年指导本科生参加各类竞赛和科研项目。 竞赛项目包括: 国家级、北京市级及校级本科生创新创业项目(国创/北创/URP) (报名时间为每年12月份) 中国农业机器人大赛,全国大学生智能农业装备创新大赛 以及其他相关竞赛 在读研究生1. 杨心成(2021级,硕博联读),研究方向 物联网计算性能优化 2. 杨可畅(2024级,博士生),研究方向 人型机器人强化学习控制 3. 程园(2022级,硕士),研究方向 基于具身智能的机器人自主建图与导航研究 4. 王茜茹(2022级,硕士,协助指导),研究方向 基于边缘计算的大模型分割方法 5. 方致远(2022级,硕士,协助指导),研究方向 PLC自动化流程优化 6. 蔡宸煜(2023级,硕士),研究方向 GPS拒止环境下无人机协同定位与集群编队 7. 张佳俊(2023级,硕士),研究方向 工业物联网系统数据分析与过程优化 8. 彭祥(2023级,硕士,协助指导),研究方向 人型机器人定位 9. 杨少帅(2023级,硕士,协助指导),研究方向 人型机器人导航与路径规划 10. 李加欣(2023级,硕士,协助指导),研究方向 智能移动机器人导航与路径规划 11. 陈怡菲(2023级,硕士,协助指导),研究方向 嵌入式虚拟机的计算性能优化 12. 雷子源(2023级,硕士,烟台),研究方向 自动配料装置 13. 肖飞(2023级,硕士,烟台),研究方向 乳品加工排程优化 14. 闫松(2024级,硕士),研究方向 待定 15. 谷欣翼(2024级,硕士),研究方向 待定 16. 邱典(2024级,硕士,协助指导),研究方向 待定 17. 娄凡(2024级,硕士,协助指导),研究方向 待定 18. 李少龙(2023级,硕士,烟台),研究方向 待定 19. 兰发宝(2023级,硕士,烟台),研究方向 待定 20. 蔡佳齐(2023级,硕士,烟台),研究方向 待定 毕业研究生1. 徐圣杰(2021年专业硕士毕业),论文《仓储环境下机器人任务分配和路径规划算法的研究》,校优秀论文,校优秀毕业生,毕业后职中国农业银行研发部,北京 2. 陈浩(2021年专业硕士毕业),论文《云计算中 DAG 型应用能耗与成本优化调度策略研究》,毕业后职于百度云计算开发部,北京 3. 王浩南(2022年学术硕士毕业),论文《基于概率运动模型的仓储多机器人系统运动规划研究》,获2020国家奖学金,毕业后就职于海康威视,杭州 4. 王文龙(2023年学术硕士毕业),论文《高斯过程运动规划与虚拟结构法相结合的多机编队研究》,毕业后就职于北方华创公司,北京 5. 杨瑞霖(2023年专业硕士毕业),论文《基于KubeEdge的多机器人联合感知与导航应用研究》,毕业后就职于北方华创西安公司,西安 6. 崔明越(2023年专业硕士毕业),论文《基于分层代价地图的地形自适应导航技术研究》,毕业后就职于渤海银行,天津 7. 孙晓辉(2023年专业硕士毕业,协助指导),论文《异构计算系统的计算任务调度与功耗最小化研究》,毕业后就职于中国电子科技南湖研究院,浙江省嘉兴市 8. 刘媛媛(2024年学术硕士毕业,协助指导),论文《基于边缘计算的温室智能监控系统研究》,毕业后就职于北京某研究所,北京 9. 闫之磊(2024年专业硕士毕业,协助指导),论文《基于边缘计算的任务调度算法研究》,毕业后中国石油大学继续读博,北京 10. 杨可畅(2024年专业硕士毕业,烟台),论文《农业物联网中面向设备算力异构环境的联邦学习算法设计及应用》,毕业后就中国农业大学继续读博,北京 11. 张金栋(2024年专业硕士毕业,硕士),论文《基于无人机单目相机的大型农田场景三维重建算法研究》,毕业后就职于长沙中信重工,湖南长沙 12. 宋文魁(2024年专业硕士毕业,硕士,协助指导),论文《面向乳品加工自动化的对象化SCADA系统设计与排程优化研究》,毕业后就职于比亚迪研发中心,广东深圳 硕士研究生
博士研究生
团队展示 |